, следовательно
, следовательноДля простоты допустим, что наш дальномер направлен на предмет так, что предмет находится на продолжении оптической оси левой части оптической системы дальномера. В таком случае левая часть дальномера дает изображение нижней части предмета в середине нижней половины поля зрения окуляра. В правый отражатель лучи света от предмета попадут по пунктирной линии (рис. 156), составляющей угол s (параллактический угол) с оптической осью (сплошная линия) правой части оптической системы дальномера. Для построения хода луча мы его проводим через центр объектива 02; луч идет под углом г к оптической оси этого объектива, и изображение верхней части предмета получится не в середине поля зрения, а будет смещено в сторону на величину I =/tg а, где / — фокусное расстояние объектива. При малых параллактических углах величина смещения определится просто как / = /s, но, следовательно
 I
I
т. е. величина смещения двух изображений друг относительно друга определяется только дистанцией D до предмета и конструктивными свойствами данного дальномера: фокусным расстоянием / его объективов и величиной его базы.
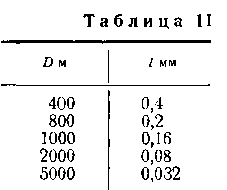
Таким образом измерение дистанции D сводится к измерению смещения одного изображения предмета относительно другого. Очевидно, что эти измерения можно произвести, пользуясь совмещением двух изображений, т. е. при помощи некоторого механизма, действующего на одно изображение. Если луч визирования левой ветви дальномера изменится и одно изображение сместится в поле зрения, то и второе изображение сместится на ту же величину, а смещение одного изображения относительно второго останется без изменения и ошибки в измерении дистанции не произойдет. Из формулы (6,1) следует, что смещение будет возрастать по мере приближения предмета; оно будет мало для более удаленных и равно нулю для очень далеких предметов (луна, звезды). Величина смещения изображения очень мала. Для дальномера с базой В — 1м и с фокусным расстоянием объектива / = 160 мм для различных дистанций получаются смещения /, приведенные в табл. И.
§ 7. Клиновые компенсаторы
Для измерения малых смещений изображения в дальномерах применяется метод компенсации параллактического угла внутри системы дальномера особым механизмом,называемым компенсатором, позволяющим устроить большую и удобочитаемую шкалу дистанций и дающим возможность измерять смещения изображений с точностью примерно до 0,001 мм.
Наиболее распространены следующие системы компенсаторов: клиновой вращающийся компенсатор, клиновой подвижной компенсатор, компенсатор с подвижной длиннофокусной линзой.
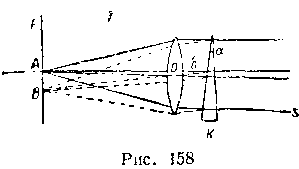
Вращающийся клиновой компенсатор. Пусть на объектив О (рис. 158) падает справа пучок параллельных оптической оси лучей. Этот пучок, после преломления в объективе, соберется в точке А фокальной плоскости F этого объектива. Пусть теперь перед объективом поставлен клин К, отклоняющий пучок падающих лучей на угол
где п — показатель преломления и а — преломляющий угол клина. Вследствие изменения направления падающего пучка лучи после преломления сойдутся в другой точке В фокальной плоскости F. Происшедшее от этого смещение изо-